[ Привет, физматика! ] [ Что нового на сайте ] [ Разобраться в теории ] [ Если не решается задача ] [ Тесты на понятливость ] [ Ну очень трудные задачи ] [ Короткие заметки ] [ Статьи ] [ Форумы ] [ О нас пишут ]
Начала относительной физики
Аннотация
Положение от том, что движение
тела можно зафиксировать только относительно другого тела (относительность
движения) изучается в школьном курсе физике сразу после введения в предмет
механики. Каждый помнит картинки из учебника, на которых объясняется, как для
вас, стоящего на берегу реки, скорость лодки в стоячей воде складывается со
скоростью течения реки. После этого не остается никакого сомнения в том, что
движение относительно и, стало быть, скорость тела есть величина относительная:
Va/c= Va/b+
Vb/c,
где: a
- лодка , b - вода , c
– берег
Но что же дальше? А дальше получается следующий вывод: не
только скорость – величина относительная, но и все кинематические
характеристики тела (начиная с координаты). Но в особенности важно то, что
относительна производная скорости – ускорение тела. Это важно потому, что
ускорение входит в левую часть основного закона классической механики – 2-го
закона Ньютона (в дальнейшем в тексте ЗН-2). Согласно последнему, всякая сила,
действующая на тело, сообщает телу прямо пропорциональное ей ускорение. Но
относительно какого тела? Об этом в ЗН-2 не сказано ни слова и даже более того,
запись ЗН-2 содержит намек, что в левой части стоит некое абсолютное ускорение
(таковым, разумеется, не называемое). Между тем простые соображения
подсказывают: поскольку сила – это всегда мера воздействия тела Б на тело А, то
и сообщает эта сила телу А ускорение относительно тела Б, а не какое-то
ускорение вообще…
Содержание
Часть 1. Механика массы
1.Относительная механика поступательного движения
1.1.Относительность скорости. Относительность ускорения. Относительность
ЗН-2 (сначала левой части, а потом – правой)
1.2.Коллизия между ЗН-2 и опытом. Понятия СК, ИСК и ЗН-1 как
средства её разрешения.
1.3.Нет СК без тела – более сильная формулировка закона
относительности. Нет ИСК (относительность ИСК)
1.4.Альтернативная формулировка ЗН-2. В ней отсутствует
коллизия
2.Количественная формулировка ЗН-2
2.1.Почему относительная скорость чемодан-земля сохраняется,
а чемодан-поезд – нет (при отсутствии взаимодействия и там и там)?
2.2.Относительность понятия равнодействующей (также
закрытость системы и связанность с
понятием АСК, см. центр вращающейся (в целом) вездесущей среды)
2.3.Окончательная формулировка ЗН-2
3.Относительная механика вращательного движения
3.1.Относительность угловой скорости
3.2.Относительность радиуса вращения.
3.3.Относительность начальной фазы вращения.
<3.4. Может ли вращающееся тело быть абсолютным?>
4.Относительность типа движения (поступательного и
вращательного)
4.1.Отсутствие векторности скорости в ЗН-2 для
поступательного движения.
4.2.Разложение движения на поступательную и вращательную
компоненты (рис.1)
4.3.Сила трения требует хотя бы частичного соответствия
поверхностей взаимодействующих тел.
4.4.Направления близкодействующих сил (для точечных тел)
можно определить только при
дальнодействии (не только сила трения!) (рис.2) (относительность
близко-дальнодействия?)
(может, это всего-навсего (физически) запрещает точечные
тела?)
Часть 1. Механика массы
1.Относительная
механика поступательного движения
Положение от том, что движение
тела можно зафиксировать только относительно другого тела (относительность
движения) изучается в школьном курсе физике сразу после введения в предмет
механики. Каждый помнит картинки из учебника, на которых объясняется, как для
вас, стоящего на берегу реки, скорость лодки в стоячей воде складывается со
скоростью течения реки. После этого не остается никакого сомнения в том, что
движение относительно и, стало быть, скорость тела есть величина относительная:
Va/c= Va/b+
Vb/c,
Где, например: a - лодка , b
- вода , c – берег.
Но что же дальше? А дальше получается следующий вывод: не
только скорость – величина относительная, но и все кинематические
характеристики тела (начиная с координаты). Но в особенности важно то, что
относительна производная скорости – ускорение тела. Это важно потому, что
ускорение входит в левую часть основного закона классической механики – 2-го
закона Ньютона (в дальнейшем в тексте ЗН-2). Согласно последнему, всякая сила,
действующая на тело, сообщает телу прямо пропорциональное ей ускорение. Но
относительно какого тела? Об этом в ЗН-2 не сказано ни слова и даже более того,
запись ЗН-2 содержит намек, что в левой части стоит некое абсолютное ускорение
(таковым, разумеется, не называемое). Между тем простые соображения
подсказывают: поскольку сила – это всегда мера воздействия тела Б на тело А, то
и сообщает эта сила телу А ускорение относительно тела Б, а не какое-то
ускорение вообще. К такому же выводу, правда косвенно, приводит и 3-ий закон
Ньютона (далее по тексту ЗН-3)
Чтобы
разобраться в этом вопросе, приведем здесь формулировку ЗН-2, данную Ньютоном: «всякое тело продолжает удерживаться в состоянии
покоя или равномерного и прямолинейного движения, пока и поскольку (!) оно не
понуждается приложенными силами изменить это состояние». [Голин Г.М., Филонович
С.Р. Классики физической науки: Справ.пособие. – М.: Высш. шк., 1989] Что ж,
всё вроде красиво. Однако всякий мало-мальски
наблюдательный человек, будучи
пассажиром городского транспорта, не раз видел следующую картину: когда машина
трогается с места, тебя отбрасывает
назад, а когда тормозит – тебя бросает вперед. Таким образом, налицо выведение
тела из состояния «покоя» (приведение его в движение) при отсутствии
действующих на него сил, то есть противоречие опыта с ЗН-2.
С трудом, конечно, верится, что господин Ньютон никогда не ездил в
экипажах, но так или иначе исправлять его оплошность с ЗН-2 пришлось не ему, а
его последователям. Чтобы спасти честь мундира, в данном случае были созданы:
1)понятие «инерциальные системы координат» (далее по тексту - ИСК); 2)оговорка для ЗН-2, что он
выполняется только в этих самых ИСК; 3)и даже закон, которому в ряду законов
механики почему-то было отведено почетное 1-ое место – ЗН-1. Почему?
Формулировка этого закона выглядит для физики весьма неординарно: инерциальные
СК существуют [И.К.Кикоин, А.К.Кикоин. Физика, 9 класс.] Зачем понадобилась
такая формулировка? Неужто кто-то сомневается в существовании ИСК? Кто? Не
желая больше испытывать терпение читателя, отошлю его к работе [ИСТОРИЯ
ПРИНЦИПА ОТНОСИТЕЛЬНОСТИ ИЛИ КОНЕЦ 'СТО'], в которой показано, что инерциальные СК (в абсолютном значении, как это
и декларируется в нынешней механике) – это пустое понятие. И поэтому ЗН-1 не
разрешает ситуацию несоответствия ЗН-2 опыту. Оговорка о том, что ЗН-2
выполняется только в ИСК, оказывается на поверку равнозначна следующему тезису:
можно подобрать такие СК, в которых ЗН-2 выполняется. Можно ли в таком случае
считать положение ЗН-2 законом? Не более, чем такое положение: можно подобрать
такие классы в школе, где количество мальчиков больше, чем количество девочек.
Во всяком случае очевидно, что при существующем положении дел ЗН-2 является
частным высказыванием. А хотелось бы сделать его общим.
Итак, до сих пор не вызывавшее ни у кого вопросов понятие ИСК оказывается
на поверку пустым. В связи с этим не стоит ли пойти дальше, и подвергнуть
сомнению более общее понятие «система координат»? Ведь что такое СК? Это некая
геометрическая конструкция из осей. Но самое главное в ней – это начало СК, то
есть некая точка в пространстве. Следовательно, говоря о том, что некоторое
тело в данной СК движется так-то, мы говорим о движении тела относительно
пустого пространства. Но не нонсенс ли это? Как можно наблюдать движение тела
относительно пустоты? Движение тела
можно наблюдать только относительно тела! И иногда применяемая оговорка «в
системе координат, связанной с телом» ничего не меняет до тех пор, пока мы
движение тел будем рассматривать в СК, то есть СК ставить на 1-ое место в
описании движения, пока не возьмем на вооружение принцип: нет тела (для начала
СК) – нет (и не может быть) и СК.
Вернемся теперь к ньютоновской формулировке ЗН-2. Принимая во внимание
вышеизложенные соображения об относительности всех кинематических
характеристик, её можно перефразировать следующим образом: если (два)
тела не взаимодействуют (друг с другом), то
их относительная скорость сохраняется (1). Однако это положение,
как мы видели выше, неверно. Но зато если (А) тела взаимодействуют, то
(Б) их относительная скорость точно не сохраняется.
Именно этот тезис следует считать адекватным выражением ЗН-2. А вот
противоположный ему тезис, с которого
мы начинали (1), оказывается, вообще говоря, ложным: если два тела
не взаимодействуют, то их относительная скорость может как сохраняться, так и не сохраняться. Он оказывается таковым в полном соответствии
с правилами формальной логики: если А является достаточным для Б, то вовсе не
обязательно А является необходимым для Б. И в то же время этот обсуждаемый
тезис оказывается ложным в полном несоответствии с интуитивными (а точнее
общепринятыми?) представлениями об операциях, не изменяющих истинности. Иначе
почему бы на этом попался сам Ньютон? Эта логическая ошибка называется
преждевременная эквивалентность.
2.Количественная формулировка ЗН-2 (и ЗН-3)
Однако полученная выше формулировка ЗН-2 имеет существенный недостаток:
она является качественной. Подумаем теперь, как получить количественную
формулировку.
Совершенно логично, что
если ускорение относительно, то и связанная с ним через ЗН-2 величина – сила
тоже должна быть относительной. Поэтому правильно принять, что
a12 = F21/m1, (1)
где a12 – ускорение тела1 относительно тела2 , F21 – сила воздействия тела2 на тело1 (а точнее – сумма таких сил различной природы).
Назовём
положение (1) ЗН-2 в относительной форме.
Введем теперь понятие абсолютного ускорения (a1, a2 и т.п.), то есть ускорения данного тела относительно абсолютного тела, то есть такого, движение которого (в принципе) не может изменить воздействие (на него) ни одного из других тел. Это достигается при условии, что масса такого тела равна бесконечности (infinity). Но есть и приблизительный случай: масса тела близка к бесконечности (по сравнению с массой других тел ((содержащей его) системы)) В том случае мы пишем m-> infinity и называем такое тело квазиабсолютным.
Нам придется также ввести понятие равнодействующей силы: F1=F21+F31 (это - для (замкнутой) системы из 3-х тел). Это понятие необходимо, так как равнодействующая сила - это и есть абсолютная сила, действующая на тело (при условии, что мы рассматриваем тело в замкнутой системе). Логично поэтому связать абсолютное ускорение с абсолютной силой.
a1= F1/m1 (2)
Назовем это положение ЗН-2 в абсолютной форме.
Возьмем теперь механическую систему из 2-х тел. Это означает, что система
изолирована, то есть не имеет никаких взаимодействий с внешними телами
(Fвн1=0, Fвн2=0).
В этом отношении формально она эквивалента абсолютному телу. Потому что равенство 0 этих сил означает, что она (в целом) будет вести себя в точности так, как ведет себя абсолютное тело. Следовательно, замкнутость систем (и изолированность тел) есть 2-ая форма квазиабсолютности.
Так вот, для такой
системы
a1= F21/m1
a2= F12/m2,
поскольку на каждое тело
системы действует только одно тело, поэтому
F1=F21, F2=F12.
Тогда
a12= a1- a2= F21/m1- F12/m2
a21= a2- a1= F12/m2- F21/m1
Но отсюда, ввиду (1),
должно быть:
F12/m2=0
F21/m1=0,
то
есть оба тела системы являются абсолютными.
Это противоречит общему статусу наших
рассуждений и показывает, что положения (1) и
(2) несовместимы. Значит, верно только одно
из них. Какое?
Для ответа на этот
вопрос рассмотрим уже знакомую нам (из ИСТОРИЯ
ПРИНЦИПА ОТНОСИТЕЛЬНОСТИ ИЛИ КОНЕЦ 'СТО')
систему 3-х тел (Земля-поезд-чемодан).
Для неё, согласно (2) имеет место следующее:
![]()
![]()
![]()
откуда:
![]()
![]()
![]()
Это – самое общее описание системы из 3-х тел. Но в нашем
конкретном случае, как известно, m1=infinity (масса Земли). Подставив это положение в
последние 3 формулы, получим:
![]()
![]()
![]()
Иначе говоря, для ускорений получены выражения вида:
a32=A-B
a21=B
a13=-A
что вовсе не соответствует классическим формулировкам, согласно которым a13=0. И всё потому, что не учтены еще 2 обстоятельства: F13=0 и F23=0 (ни одно из тел системы не
взаимодействует с чемоданом <=> чемодан
является изолированным телом - внутри
системы). С учетом этого получится:
![]()
![]()
a13=0
что по форме
выглядит как
a32=-B; a21=B; a13=0
и соответствует классическим представлениям.
Следовательно, положение (2) - ЗН-2 в абсолютной форме - является верным.
Для сравнения приведем описание исследуемой системы в абсолютной форме:
a1= 0; a2= (F12+ F32)/m2; a3= 0
Отсюда становится ясно, почему возникает эта путаница с невесть откуда взявшимся (ненулевым) ускорением чемодана. Потому что, фактически (=содержательно) переходя к системе из 3 тел, мы формально остаемся в системе из 2-х тел (чемодан-поезд). Что выражается в рассмотрении ускорения a32 вместо (-> под видом) ускорения a3. Система чемодан-поезд уже перестала быть квазиабсолютной (замкнутой, а мы (всё еще) этого не замечаем (а точнее: наполовину замечаем, а наполовину - нет).
Итак, общий вывод: ЗН-2 верен не в мифических ИСК, а в замкнутых (механических) системах и относительно абсолютных тел.
Это понятно еще и с другой точки зрения: если в (замкнутой) системе появляется невесть откуда взявшаяся сила, то тем самым нарушается закон сохранения энергии.
В
дополнение к этому заметим, то в полученных
формулах имеет место сила F32, которая, согласно классическому ЗН-3
(действие = противодействию), равна 0. Но оказывается, что даже
и в случае неравенства этой силы 0 результат (формально) соответствует
классическим
представлениям. Быть может, ЗН-3 - излишний закон? Тем более, что он не
выводится из дефиниций относительных величин, как, например, положение a12= -a21. Тогда
откуда же его вывел Ньютон? Может быть, из
закона сохранения импульса? Но закон сохранения импульса
- старше ЗН-3. Поэтому это он выведен из ЗН-3, а
не наоборот.
Есть еще одна важная деталь, которая обращает на себя внимание – это
равенство 0 ускорения
a13,
но неравенство 0 ускорения a12! Ведь, казалось бы, и 1-ая и 2-ая величина должны быть равны 0. Ведь
тело1 – абсолютное, и это означает, что его его движение неизменно по отношению
ко всем остальным телам.
(соображение по ходу: движение может быть неизменно во 2-ой производной, но
отсюда вовсе не следует, что оно неизменно в 3-ьей производной, и так далее. Не
следует вообще, хотя следует в частности: из равенства старшей производной
следует равенство 0 всех низших).)
Но при пристальном
рассмотрении видно, что тело2 имеет одно существенное
отличие от тела3, а именно: тело1
действует на тело2 (иначе оно не могло бы тормозить), а на тело3 – не
действует. Кроме того также и F23=0, поскольку без этого получилось бы:
![]()
![]()
![]()
что тоже не
соответствует классическим представлениям об инерции. Таким образом, тело3 (в
данном случае) – это квазиабсолютное (изолированное) тело.
Поэтому вывод: ускорение
абсолютного тела (действительно) равно 0 относительно не всякого тела, а только
относительно квазиабсолютного (или абсолютного).
Есть и еще один: при отсутствии взаимодействия
ускорение
равно 0 только относительно абсолютных тел.
3.Относительность вращательного движения
В случае вращательного движения вектор линейной скорости, в отличие от
поступательного движения, есть некая функция от времени. Поэтому нужно указать
следующие характеристики этой функции: угловую скорость вращения, радиус
вращения, ну и еще центр вращения (а также начальную фазу вращения). Итого
получается 4 характеристики вместо одной. Но так или иначе, при установлении
(исследовании) относительности нужно оперировать с функциями в целом. Только в
этом случае можно определить характеристики результирующей (вследствие
относительности) функции.
Зададимся вопросом: если ни у кого не
вызывает сомнения, что движение
относительно, то почему неявно это всегда относится к поступательному движению?
Ведь есть еще и вращательное. Но как подступиться к относительности последнего?
По-видимому, наиболее
естественно рассматривать это движение относительно вращающихся же тел (или,
говоря языком ортодоксальной физики, во вращающейся системе координат). На эту
мысль наводит, например, то обстоятельство, что Луна всегда повернута к Земле
одной и той же стороной (то есть неподвижна относительно Земли), хотя известно,
что она вращается вокруг Земли. Но известно также, что Луна вращается и
относительно себя, причем в точности (!) с той же самой угловой скоростью, что
и вокруг Земли. В итоге получается: Луна неподвижна относительно Земли (так
было бы, если бы Земля тоже не вращалась относительно себя). В общем, сплошные
сюрпризы.
Итак, пусть некое тело А
вращается (вокруг начала координат) по
закону x=cos(t), y=sin(t). Тогда траектория тела А выглядит как
окружность с радиусом 1, а угловая скорость вращения равна тоже 1, причем
движение происходит против часовой стрелки. Пусть началом координат стало тело
Б, которое тоже вращается, но по закону x=1.1*cos(t), y=1.1*sin(t). При
этом тело Б тоже оказывается абсолютным.
(но разве так бывает? Абсолютное тело, и движется? Бывает. Ибо абсолютность тела – это вовсе не отсутствие его движения, а отсутствие изменения движения.)
(Причем закона движения, а не его мгновенной характеристики, как-то ускорения, например. В соответствии с представлением о вращательном движении как о чем-то целостном и даже естественном)
(отсюда как следствие: абсолютных тел может быть много)
В результате какое
движение тела А видит наблюдатель? Тоже вращение вокруг начала координат, но не
по радиусу 1, а по радиусу 0.1, с той же угловой скоростью (по модулю), но со
сдвигом фазы на пол-оборота (вращение в противофазе). Хотя казалось бы, тело А
должно быть неподвижно относительно тела Б. Это действительно достигается, но
только если радиус RБ-> 1. Если же RБ становится < 1, то сдвиг фазы исчезает.
Пусть теперь тело Б
вращается с той же угловой скоростью, но только с
R=0. В этом случае получается, что тело Б вращается
относительно себя, а тело А относительно него – по закону x=cos(t), y=sin(t), то есть
совершенно по тому же закону, как если бы тело Б не вращалось. Что-то здесь не
так! Подтверждает эту мысль и следующее соображение: в случае неподвижного
расположения тела Б в начале координат тело Б относительно тела А движется по
закону x= 0-cos(t), y= 0-sin(t). Что, как ни
странно, соответствует сдвигу фазы на пол-оборота, и при этом скорость вращения
вовсе не меняется на противоположную.
Пусть теперь тело Б
(начало координат) вращается вокруг себя с w=-1. В этом случае, опять же как ни странно, мы имеем
вращение тела А в том же направлении (против часовой стрелки). То есть
изменение вращения находящегося в начале координат тела ничего не меняет в
результирующем законе. И лишь если мы начнем увеличивать радиус вращения тела
Б, то траектория движения тела А (относительно Б) превратится в эллипс, тем
более вытянутый вдоль оси ординат, чем больше RБ
приближается к 1 (=RА). При RБ=1 этот
эллипс вырождается в колебательное движение вдоль отрезка y=-1..1, то есть вращение исчезает. При дальнейшем же увеличении RБ А начинает вращаться, но уже в противоположном
направлении (по часовой стрелке)(и со сдвигом фазы на Pi), а траектория А снова превращается в эллипс,
постепенно приближающийся к окружности. Но опять же полный оборот происходит
за t=2*Pi.
Испытаем теперь случаи
вращения тела Б с большей или меньшей (по модулю) угловой скоростью. Разберем
сначала случаи wБ/wА >0. При этом относительное движение тела А также
теряет характер собственно вращения.(см.рис.1) Причем это тем более заметно,
чем больше wБ/wА, а также чем больше RБ по сравнению с нулем.
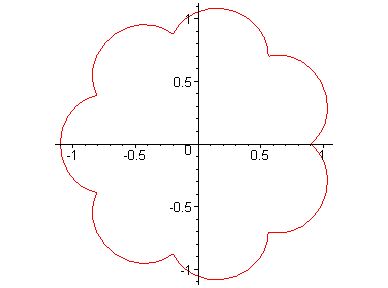
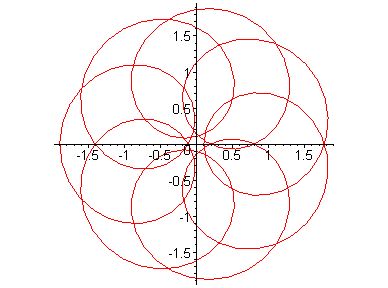
Рис.1.RB=0.1 wB=8 Рис.1а. RB=0.9 wB=8
То же самое имеет место и
при wБ/wА< 0.
(рис.2) Но только угловые скорости (как бы, в отношении порядка симметрии) складываются,
а не вычитаются, как в предыдущем случае. Вращение также происходит против
часовой стрелки, и не происходит никакого сдвига фаз.
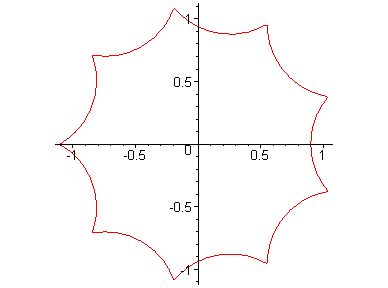
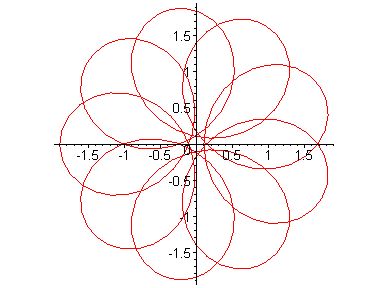
Рис.2.RB=0.1 wB=-8 Рис.2а.RB=0.9 wB=-8
Теперь займемся исследованием влияния сдвига фазы
вращения тела Б. Пусть тело Б вращается относительно начала координат с той же
частотой, но с отставанием фазы по сравнению с телом А. Тогда результирующее
движение тела А - это опять-таки вращение по окружности, против часовой
стрелки. Причем чем меньше отставание фазы тела Б, тем меньшего диаметра
траектория этого движения тела А, и наоборот, максимального радиуса (2) эта
траектория достигает при сдвиге фазы на пол-оборота. Меняется также
результирующий сдвиг фазы: при начальном сдвиге <Pi имеем опережение фазы, а при начальном сдвиге >Pi имеем отставание фазы, причем тем большее, чем
больше RB. Но такое наблюдается только до RB=1, при RB>1
увеличение отставания фазы тела Б (до Pi) ведет к
уменьшению результирующего опережения.
4.Относительность типа движения
Согласно логике традиционного
изложения, за предыдущим параграфом должен был идти, как это нетрудно понять,
параграф под названием «Относительная механика вращательного движения». Однако
соображения, приведенные ниже, заставили отказаться от этой традиционной
логики.
Во-первых, обратим внимание на
следующее несоответствие в ЗН-2 для поступательного движения: скорость, вообще говоря, есть величина
векторная, поэтому и относительная скорость
есть разность векторов, а в ЗН-2 мы обращаемся со скоростью чисто арифметически,
как будто это скаляр. Что позволяет нам так делать? То, что мы
рассматриваем движение тела только
относительно тел, движущихся поступательно и притом по параллельным
траекториям. Такой подход, кстати говоря, в точности эквивалентен подходу,
когда мы рассматриваем движение тела только относительно так называемых
инерциальных тел, то есть движущихся относительно 3-его тела не только
поступательно и по параллельным с рассматриваемым телом траекториям, но и
равномерно. Таким образом, и в этом случае мы неправомерно отбрасываем все те
тела, которые движутся иначе. Если же этого не делать, то придется принимать в
учет векторность скорости. И тогда траектория движения тела может стать как
угодно сложной.
Мы же привыкли различать всего 2
типа движения: поступательное и вращательное. Никогда даже не задумываясь над
тем, как мы их (формально) различаем. В самом деле, пусть имеем два тела, А и
Б. Пусть относительная скорость VА/Б
есть вектор (см. рис.1) Как движется тело А (относительно тела Б)? Чтобы установить
это, мы проводим естественную ось АБ (через центры масс тел А и Б) и находим
проекции вектора относительной скорости VА/Б на ось АБ и перпендикулярную ей ось (n). Если проекция на ось n окажется равна 0, то мы
имеем поступательное движение тела А относительно тела Б. Если же окажется
равной 0 проекция вектора относительной скорости на ось АБ, то мы имеем вращательное движение тела А относительно
тела Б. (При этом может случиться и так, что находя относительную скорость тела
Б относительно А мы получим, что, наоборот, тело Б вращается относительно тела
А.) Во всех же остальных случаях мы имеем комбинацию поступательного и
вращательного движения. Таким образом, поступательное и вращательное движение –
это лишь вырожденные случаи всего многообразия движений. Но самое главное – сам
тип движения тела относителен: относительно одного тела данное тело движется
вращательно, относительно другого – поступательно. Всё определяется тем, как
расположена естественная ось (пары тел) относительно вектора относительной
скорости тел.
Таким же способом, как ни
странно, определяется и направление сил трения и упругости между телами. Силы
упругости (между ними) имеют место, если имеется составляющая относительной
скорости этих тел, направленная вдоль прямой АБ, а силы трения – если имеются составляющие этой скорости,
перпендикулярные этой прямой. Но, чтобы провести прямую между телами,
необходимо, чтобы между ними (их центрами масс) было ненулевое расстояние. Стало быть, так называемые близкодействующие
силы – это (всё-таки) дальнодействующие силы? В том смысле, что их направление
невозможно установить для точечных тел, для таковых эти силы просто не имеют
смысла.
Литература
1.Голин Г.М., Филонович
С.Р. Классики физической науки: Справ.пособие. – М.: Высш. шк., 1989
2. И.К.Кикоин,
А.К.Кикоин. Физика, 9 класс.
3.ИСТОРИЯ ПРИНЦИПА ОТНОСИТЕЛЬНОСТИ ИЛИ КОНЕЦ 'СТО'
Изменения внесены 21.09.04
Впервые опубликовано НАЧАЛА ОТНОСИТЕЛЬНОЙ ФИЗИКИ